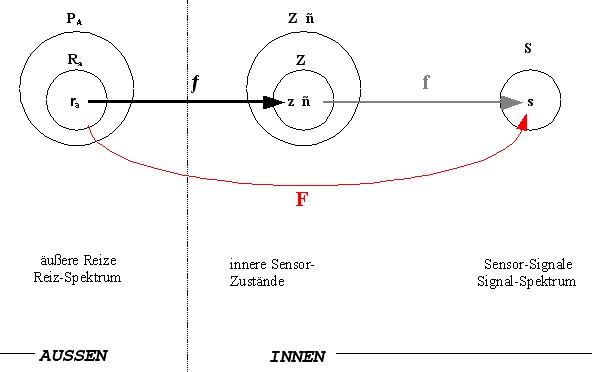
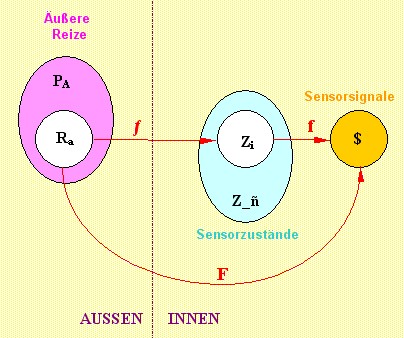
1.5.1 DEFINITION: Reizerfassungs-FunktionSensorensysteme, egal ob natürliche oder technische, lassen sich in ihrer Funktion durch die zugehörigen Zustandsräume beschreiben. Da die inneren Zustände durch äußere Reize verursacht werden, stellen die Zustandsräume mithin die maximalen Erfassungsräume eines Sensorsystems dar.Mathematisch gesehen läßt sich dieser Zusammenhang als Abbildung (Funktion) beschreiben. Es werden jedem Element einer Menge ein Element einer anderen Menge zugeordnet. In diesem Fall wird einem äußeren Reiz ra einem innerer Zustand z eines Sensors ñ zugeordnet. Der äußere Reiz verursacht ja den inneren Zustand. Da aber nicht alle äußeren Reize in innere Sensorzustände umgewandelt werden, muß die Betrachtung auf eine gewisse Teilmenge der äußeren Reize eingeschränkt werden. Und zwar auf die Menge der registrierten äußeren Reize (Signale). Also die äusseren Signale, die auch innere Elementarsensor-Zustände erzeugen. Diese Zuordnung heißt dann Reizerfassungs-Funktion. PA sei die Gesamtmenge der sensorisch registrierbaren äußeren Signale Ra sei eine Menge äußerer Reize mit Ra ist echte Teilmenge von PA und ra ist Element von Ra Z_ñ sei das Zustandsspektrum eines Sensors ñ und z_ñ ist Element von Z_ñ Es sei Z Teilmenge (oder gleich) von Zustandsspektrum Z_ñ Dann sei ƒ eine Abbildung mit folgenden Eigenschaften : a) ƒ : Ra ---> Z Teilmenge (oder gleich) von Z_ñ b) ƒ(Ra) = Z Teilmenge (oder gleich) von Z_ñ c) ƒ(ra ) = z_ñ ƒ heißt die Reizerfassungs-Funktion des Sensors ñ Ra heißt dann Reizspektrum des Sensors ñ
Abbildung
1.5.1 - Reizerfassungs-Funktion ƒ |